新手教程-使用真机-云平台或者SDK#
用例描述#
通过旅行商问题(TravelingSalesmanProblem,TSP)展示从建模、提交Qubo矩阵到云平台、从云平台获取计算结果的全流程
方式一:通过云平台上传QUBO矩阵计算#
代码建模并生成qubo矩阵#
1# pylint: disable=<R0801>
2"""
3TSP problem solved using CIM.
4"""
5import numpy as np
6import pandas as pd
7import kaiwu as kw
8
9
10def is_edge_used(var_x, var_u, var_v):
11 """
12 Determine whether the edge (u, v) is used in the path.
13
14 Args:
15 var_x (ndarray): Decision variable matrix.
16
17 var_u (int): Start node.
18
19 var_v (int): End node.
20
21 Returns:
22 ndarray: Decision variable corresponding to the edge (u, v).
23 """
24 return kw.qubo.quicksum([var_x[var_u, j] * var_x[var_v, j + 1] for j in range(-1, n - 1)])
25
26
27if __name__ == '__main__':
28 # Import distance matrix
29 w = np.array([[0, 1, 2],
30 [1, 0, 0],
31 [2, 0, 0]])
32 # Get the number of nodes
33 n = w.shape[0]
34
35 # Create qubo variable matrix
36 x = kw.qubo.ndarray((n, n), "x", kw.qubo.Binary)
37
38 # Get sets of edge and non-edge pairs
39 edges = [(u, v) for u in range(n) for v in range(n) if w[u, v] != 0]
40 no_edges = [(u, v) for u in range(n) for v in range(n) if w[u, v] == 0]
41
42 qubo_model = kw.qubo.QuboModel()
43 # TSP path cost
44 qubo_model.set_objective(kw.qubo.quicksum([w[u, v] * is_edge_used(x, u, v) for u, v in edges]))
45
46 # Node constraint: Each node must belong to exactly one position
47 qubo_model.add_constraint(x.sum(axis=0) == 1, "sequence_cons", penalty=5.0)
48
49 # Position constraint: Each position can have only one node
50 qubo_model.add_constraint(x.sum(axis=1) == 1, "node_cons", penalty=5.0)
51
52 # Edge constraint: Pairs without edges cannot appear in the path
53 qubo_model.add_constraint(kw.qubo.quicksum([is_edge_used(x, u, v) for u, v in no_edges]),
54 "connect_cons", penalty=20.0)
55
56 qubo_mat = qubo_model.get_matrix()
57 pd.DataFrame(qubo_mat).to_csv("tsp.csv", index=False, header=False)
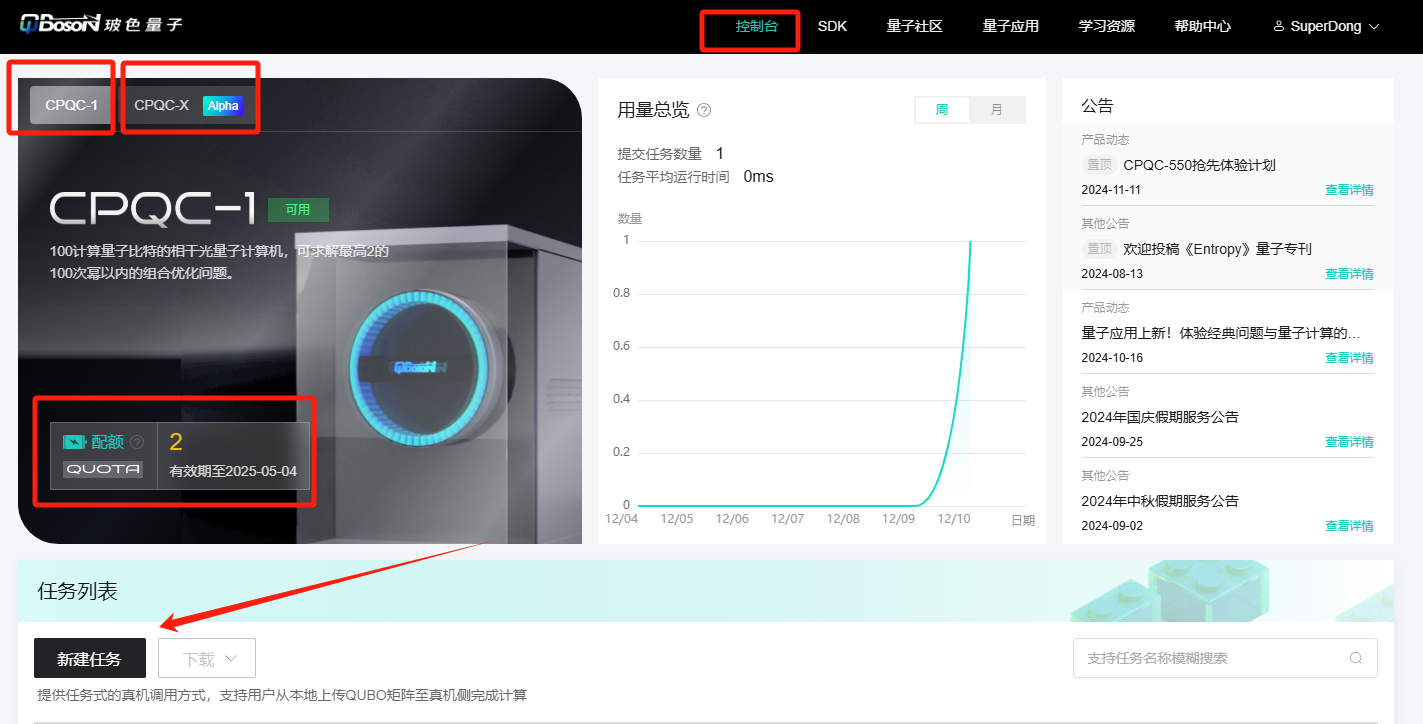
登录云平台上传矩阵#
登录光量子云计算平台后进入控制台,选择真机后点击新建任务
进入任务配置页面后,填写任务名称、上传矩阵,确认后点击下一步

进入确认配置页面,确认任务和真机信息后点击确定按钮

进入提交任务页面,显示提交成功

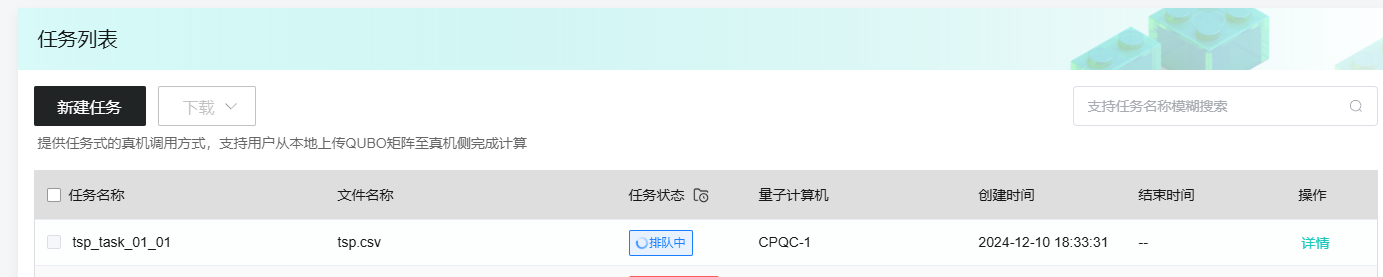
返回控制台,任务正在校验中

校验成功后任务进入排队中状态
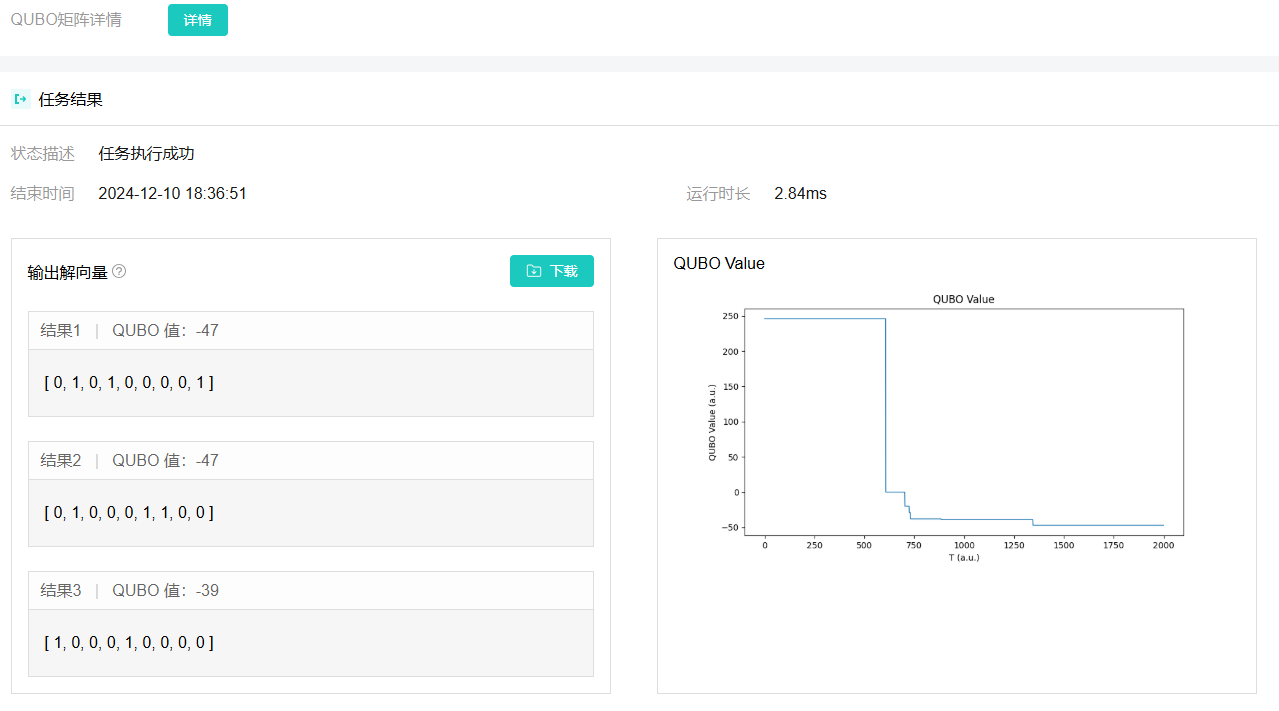
任务完成后点击详情进入结果详情页面

查看结果详情(qubo解向量、qubo value演化曲线、任务执行时间等)
方式二:直接使用SDK调用真机#
下面是同样一个TSP的问题,使用SDK直接调用真机求解的例子。 由于量子计算机有精度限制,例子中用SDK自带的PrecisionReducer进行精度适配。 想了解更多的关于精度的知识,
参见
1"""
2TSP calling CIM example
3"""
4import kaiwu as kw
5import numpy as np
6
7
8# 定义边使用判断函数
9def is_edge_used(var_x, var_u, var_v):
10 """
11 Determine whether the edge (u, v) is used in the path.
12
13 Args:
14 var_x (ndarray): Decision variable matrix.
15
16 var_u (int): Start node.
17
18 var_v (int): End node.
19
20 Returns:
21 ndarray: Decision variable corresponding to the edge (u, v).
22 """
23 return kw.qubo.quicksum([var_x[var_u, j] * var_x[var_v, j + 1] for j in range(-1, n - 1)])
24
25
26if __name__ == "__main__":
27 # Set the save path for intermediate files
28 kw.common.CheckpointManager.save_dir = '/tmp'
29 # Define distance matrix
30 w = np.array([[0, 0, 1, 1, 0],
31 [0, 0, 1, 0, 1],
32 [1, 1, 0, 0, 1],
33 [1, 0, 0, 0, 1],
34 [0, 1, 1, 1, 0]])
35
36 n = w.shape[0] # Number of nodes
37
38 # Create a QUBO variable matrix (n x n)
39 x = kw.qubo.ndarray((n, n), "x", kw.qubo.Binary)
40
41 # Generate the set of edges and the set of non-edges
42 edges = [(u, v) for u in range(n) for v in range(n) if w[u, v] != 0]
43 no_edges = [(u, v) for u in range(n) for v in range(n) if w[u, v] == 0]
44
45 # Initialize the QUBO model
46 qubo_model = kw.qubo.QuboModel()
47
48 # Set the objective function: minimize path cost
49 path_cost = kw.qubo.quicksum([w[u, v] * is_edge_used(x, u, v) for u, v in edges])
50 qubo_model.set_objective(path_cost)
51
52 # Add constraints
53 # Node constraints: Each node must occupy one position
54 qubo_model.add_constraint(x.sum(axis=0) == 1, "node_cons", penalty=5.0)
55
56 # Location constraint: Each location must have at least one node.
57 qubo_model.add_constraint(x.sum(axis=1) == 1, "pos_cons", penalty=5.0)
58
59 # Edge constraint: Non-connecting edges must not appear
60 qubo_model.add_constraint(
61 kw.qubo.quicksum([is_edge_used(x, u, v) for u, v in no_edges]),
62 "edge_cons", penalty=5.0
63 )
64
65 # Configure the solver, set wait=True, and wait for the solution to complete.
66 optimizer = kw.cim.CIMOptimizer(user_id="123124141", sdk_code="46sdgvsdgrreewrw", task_name="tsp", wait=True)
67 optimizer = kw.cim.PrecisionReducer(optimizer, 8) # 8-bit precision
68 solver = kw.solver.SimpleSolver(optimizer)
69
70 # Solve the problem
71 sol_dict, qubo_val = solver.solve_qubo(qubo_model)
72
73 # Verification Results
74 unsatisfied, res_dict = qubo_model.verify_constraint(sol_dict)
75 print(f"Number of unsatisfied constraints: {unsatisfied}")
76 print(f"constraint value: {res_dict}")
77
78 # Calculate path cost
79 path_cost = kw.core.get_val(qubo_model.objective, sol_dict)
80 print(f"Actual path cost: {path_cost}")